")
Space exploration has come a long way since the first human stepped foot on the moon. From robotic rovers exploring the red planet to sophisticated orbiters and landers, space exploration has been revolutionized by the use of robots. These incredible machines have enabled us to explore distant planets, moons and galaxies like never before, leading us to an era of unprecedented discoveries.
Robonaut
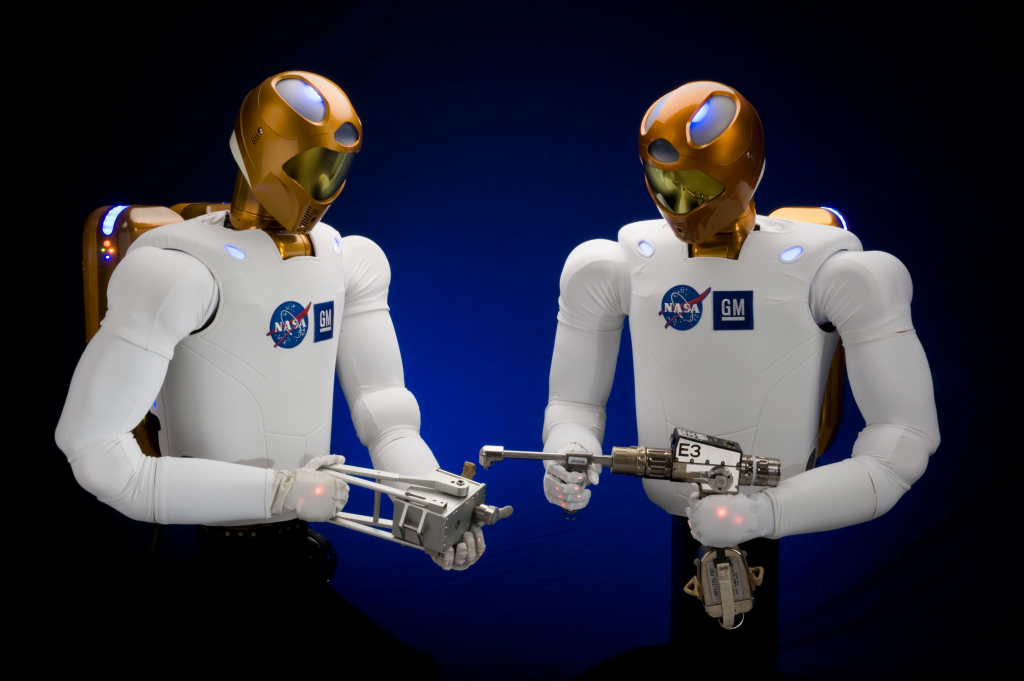
The goal of the joint DARPA-NASA project Robonaut is to develop a humanoid robot that can perform similar tasks to humans during exploration and the 1970s. The Robonaut project’s main objective is to create a robot with dexterity superior to that of a suit-clad astronaut. There are now four different robonauts, and more are being developed. This variety allows for the study of various mobility and tasking stages for each setting. These four robots all have different ways of moving about. Some robot iterations rely on the Segway HT for movement
Rassor

Regolith Advanced Surface Systems Operations Robot is pronounced “Razor.” When it is nearly finished, the lunar robot, which has a compact tank-like chassis with a Drum excavator and either side mounted on arms that may help the robot climb over any obstacles, will independently extract soil. With these arms, the robot can lift itself off the ground to clean its tracks of trash and successfully correct itself if it topples over. RASSOR stands around 2.5 feet tall and is estimated to weigh roughly 100 pounds with the drums vertical. The RASSOR will work at an average pace of around 20 centimeters per second, which is five times quicker than the Curiosity rover’s peak speed on Mars.
Spidernaut

source: Electronicproducts
Spidernaut is an Extra Vehicular Robot (EVR) inspired by arachnids that NASA is developing for future space trips for building, maintenance, and repair tasks that would be too challenging or dangerous for a human. Three separate joints—one rotational in the hip and two more that are linearly actuated—can be used to move the Spidernaut’s legs. Although each leg only weighs 40 pounds, it can apply a force of up to 250 pounds and sustain 100 pounds. Spidernaut will be able to climb across a variety of surfaces, including solar panels and the outside of spacecraft, without causing any harm thanks to its ultimate weight distribution of nearly 600 pounds among its eight legs.
Athelete
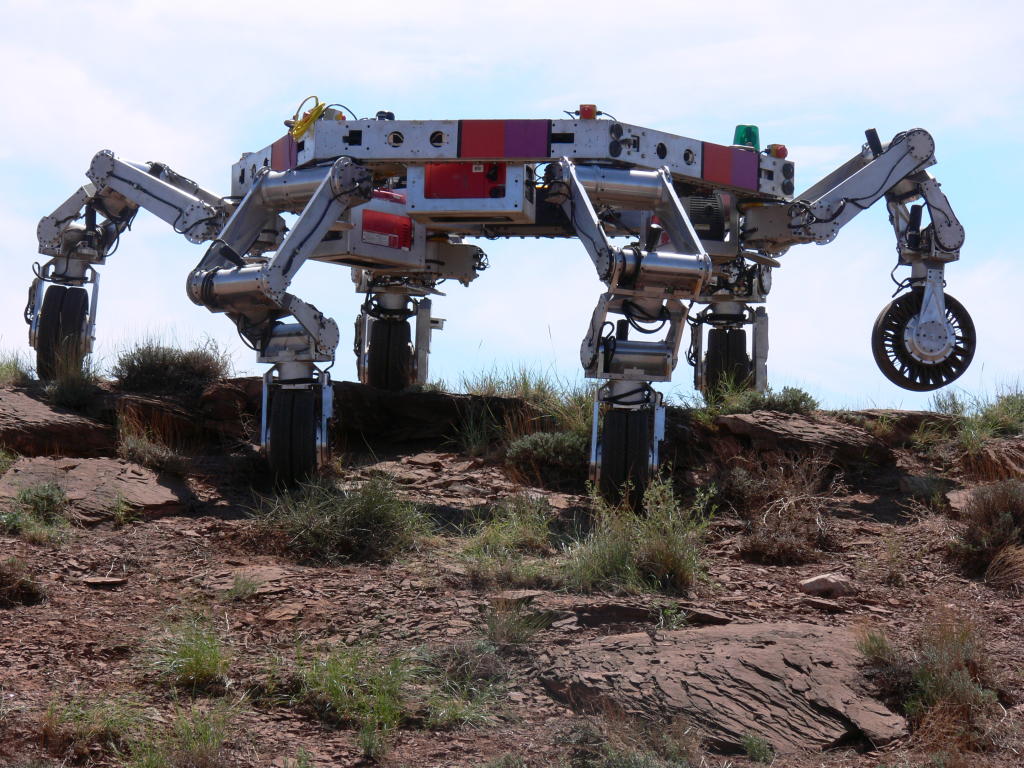
A six-limbed robotic lunar rover test-bed called ATHLETE (All-Terrain Hex-Legged Extra-Terrestrial Explorer) is being created at the Jet Propulsion Laboratory (JPL) of the California Institute of Technology. A variety of systems that might be employed for lunar or Martian exploration are being tested on ATHLETE. The six limbs of the ATHLETE each have six degrees of freedom, or six independently moving joints. The ATHLETE has six wheels for rolling around in general, but if it finds more difficult terrain, it can lock each wheel into position and use its limbs to move.
Dextre

Source: NASA
On the International Space Station’s Mobile Servicing System, Dextre is a two-armed robot called a telemanipulator (ISS). It takes the place of various tasks that would otherwise require spacewalks. It was launched on STS-123 on March 11, 2008.
Spheres
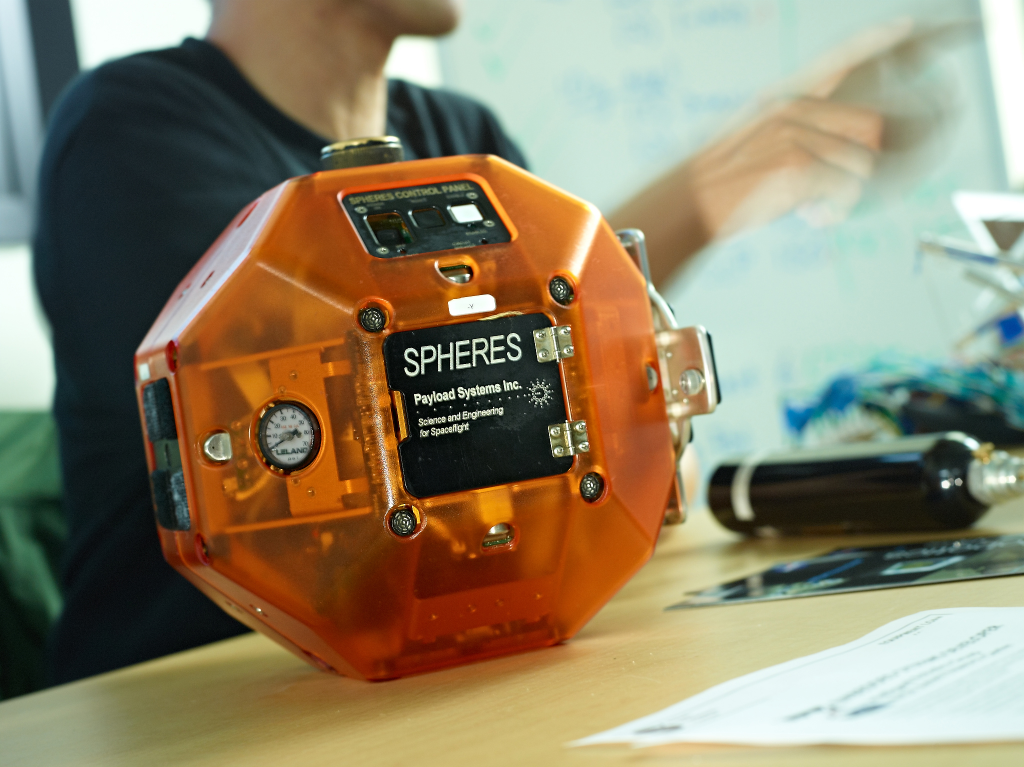
Synchronized Position Hold, Engage, Reorient, Experimental Satellites is the acronym for these satellites. These satellites, which are now in the experimental stage at NASA, are about the size of a bowling ball. Each Sphere is independent and has its own power source, propulsion system, computer system, and navigational tools. The Spheres are made to be tested within a space station to see how well they can adhere to a specific set of flying guidelines. Three spheres will receive instructions for an autonomous rendezvous and docking operation while inside a space station. The outcomes of the sphere testing will be used in the maintenance of satellites, the construction of vehicles, and the design of upcoming formation-flying spacecraft.
Curiosity Rover
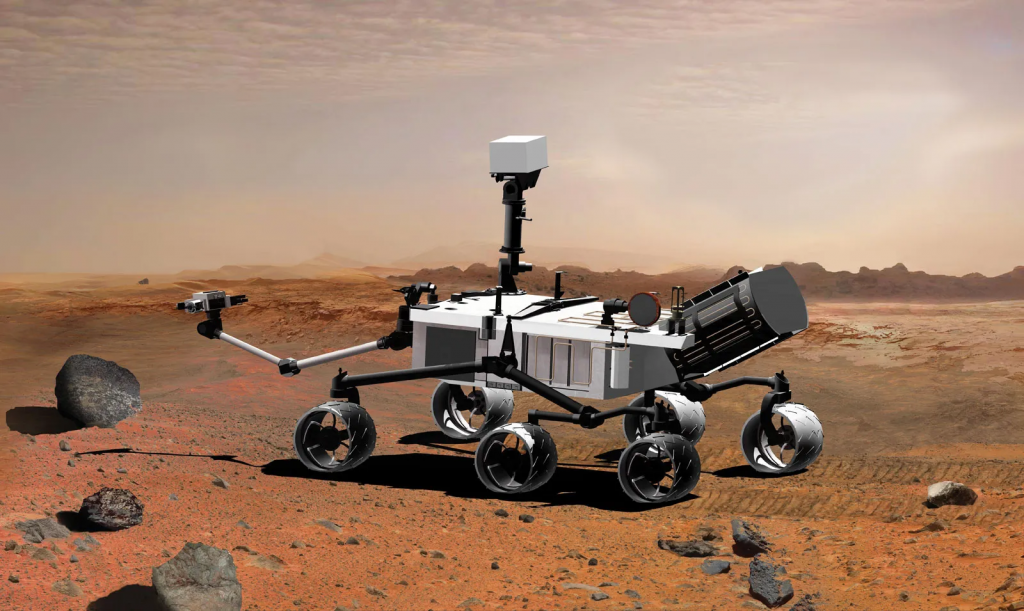
Source: Britannica
A portable laboratory called the Mars rover Curiosity was launched from Cape Canaveral in 2011. August 6, 2012 saw the Curiosity’s landing on Mars’ surface. Being five times as heavy and twice as long as its processors, this was the biggest rover NASA has ever sent to Mars. Despite its larger size, Curiosity used numerous design features from earlier Mars rovers, including six-wheel drive, rocker-bogie suspension, and cameras mounted on the rover’s mast to aid with rover navigation. But unlike its predecessor, the Curiosity has a full inside laboratory for studying the Martian rocks and soil.



{kind=link}